My First Robot
I had always wanted to write a blog. Finally I've convinced myself to write one!
I'm Praveen, an undergrad Mechanical Engineering student at the School of Engineering, Cochin University of Science and Technology. I'm very much passionate about Robotics,AI and other related fields and would like to share my journey into such stuff through this blog.
So my first post would be about............ of course.......... my first step into the exciting field of Robotics. Yes my first robot doesn't do much and has limited intelligence, but hey, its just the beginning......
Her name is Wally........ no she has nothing to do with Wall-E. The name comes due to her strange behavior. She is indeed intelligent enough to avoid anyone coming in her way and also doesn't go banging her head against the wall. But she has a big problem, she loves to hang out with the wall and follows it everywhere. I really don't know why she keeps ignoring me!!
STOP! Please Don't close that tab just yet! I was just kidding...........I'm really serious about robotics :P
Serious stuff ahead....... I PROMISE
Wally is a very simple and easy to build Obstacle-Avoiding robot.
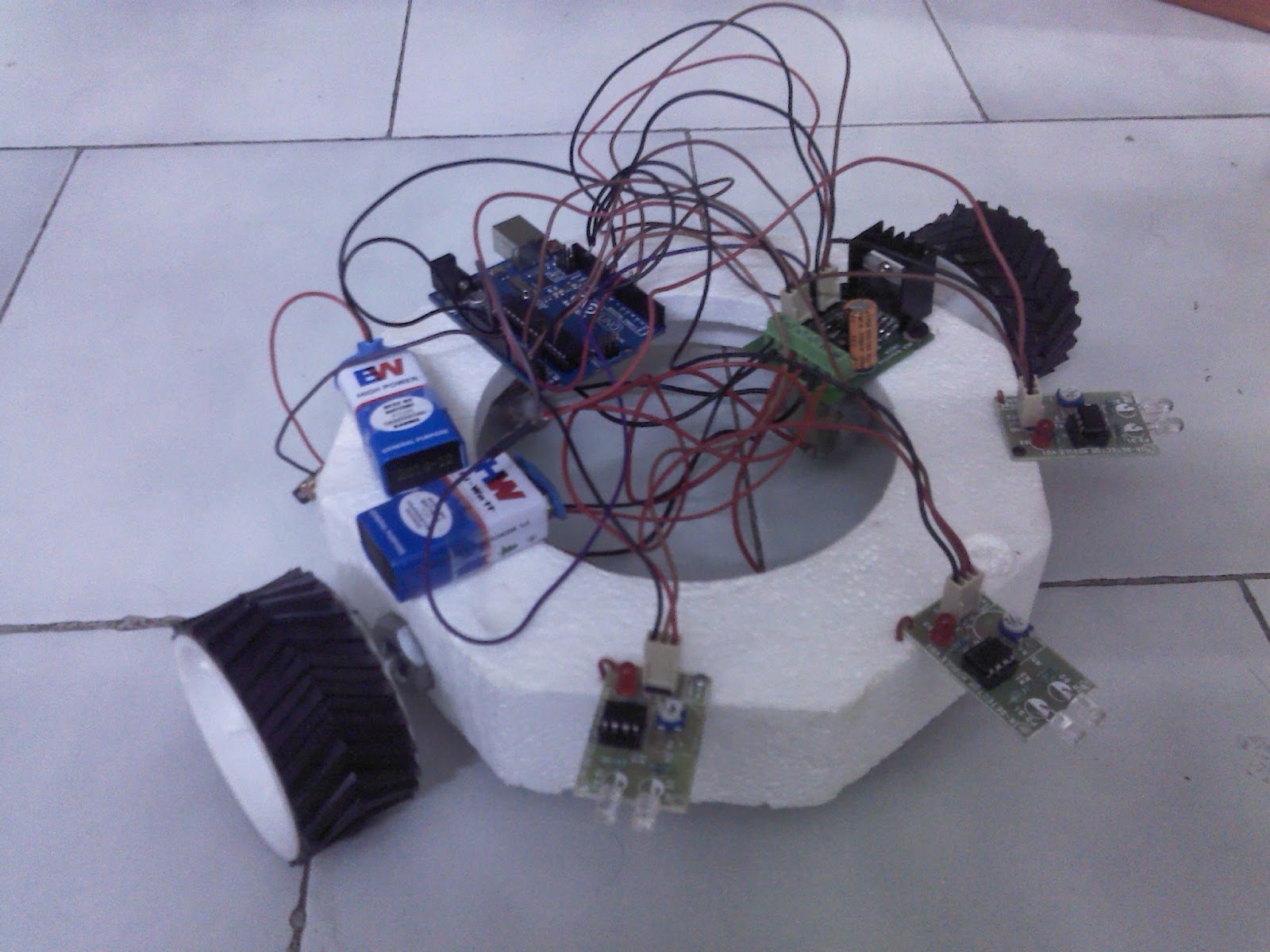
Isn't she beautiful?
O.K...... all right I know she's a bit eccentric.
An Arduino UNO R3 has been used as her brain. I chose the Arduino platform because its huge community backing and easy programming using the Arduino IDE which uses a language based on C.
I used an L298 motor driver board which I bought from NEX Robotics to control the 200 rpm motors.
I got a few cheap IR sensors from a local electronics shop. Wally uses 3 of them to "see" the obstacles.
The red LED on the sensor board lights up when an obstacle is sensed.
The program logic is very rudimentary, when the left sensor senses an obstacle, Wally turns right and when the right sensor senses an obstacle Wally turns left. The turn is executed till the obstacle is out of sight of the sensor. A combination of other sensor values are also used in programming Wally's behavior.
Here's the link to the code used : https://gist.github.com/4548932
Here is a video of Wally in action. Notice how she keeps close to the wall without hitting it. This was not programmed but happened due to the different speeds of the two motors.
That would be all for now.
This was my first try at robotics. Suggestions for improvement are welcome.


will u send for 2sensors using L293D & arduino
ReplyDeletecan you please upload schematics or pin connections of your bot?
ReplyDeleteGood work bro...
ReplyDelete